The project Life Sure aims to develop a new way of dredging the sea floor using new technology. The methods developed will be autonomous, cost effective and sustainable. Dyno Robotics is responsible for all the electronics and programming on the autonomous raft.

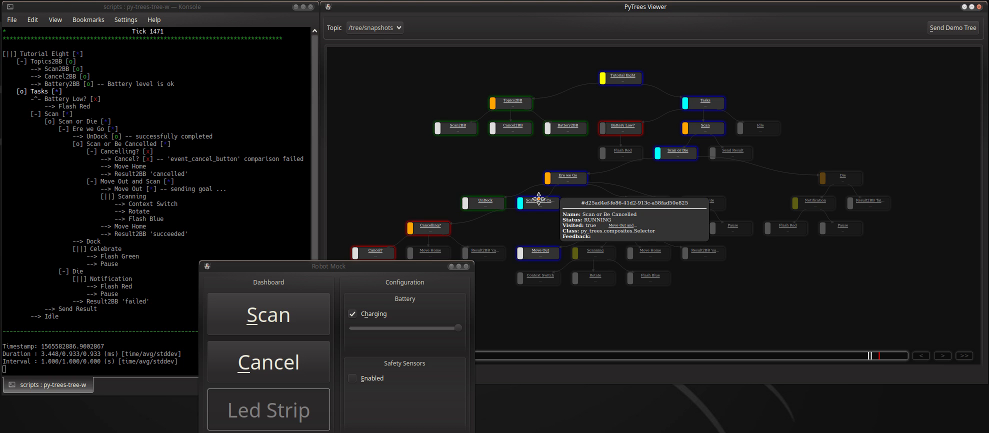
During the development we created a simulation in which most of the autonomous systems can be tested before deploying to the physical robot raft in Kalmar. This enables quick iterations on the software.
We also built a small scale test platform which we used to get all the electronics setup and tested in our workshop.
Then the raft was remote controlled from land to tests its maneuvering capabilities.
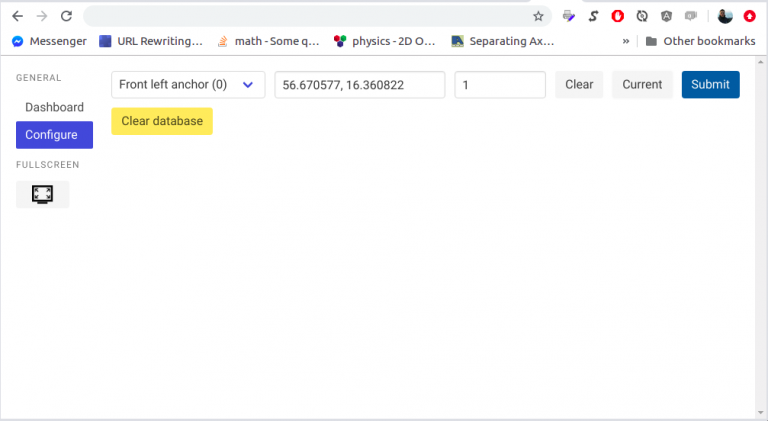
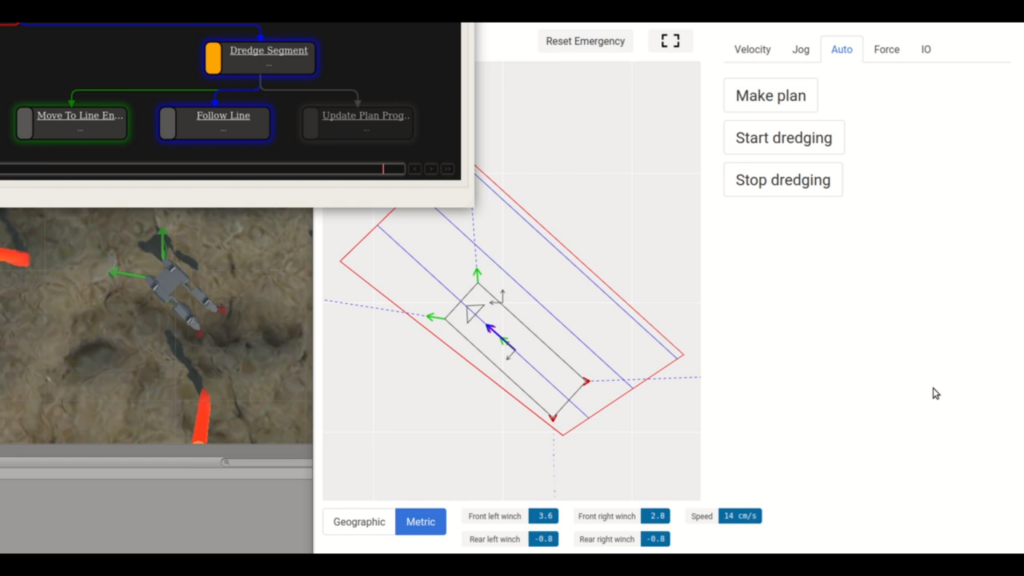
The raft uses an RTK GPS with centimeter precision to localize itself, and torque controlled BLDC motors to pull in ropes attached to anchors. By continuously solving a set of linear equations the control loop calculates the rope forces that are needed to move the raft along the planned path at a set speed.