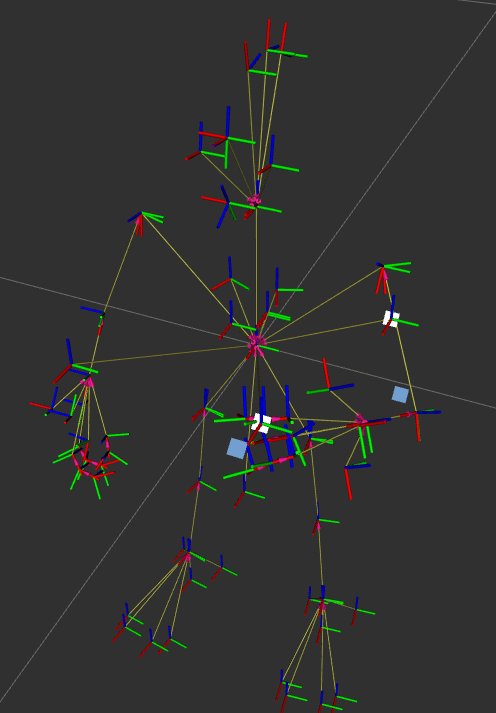
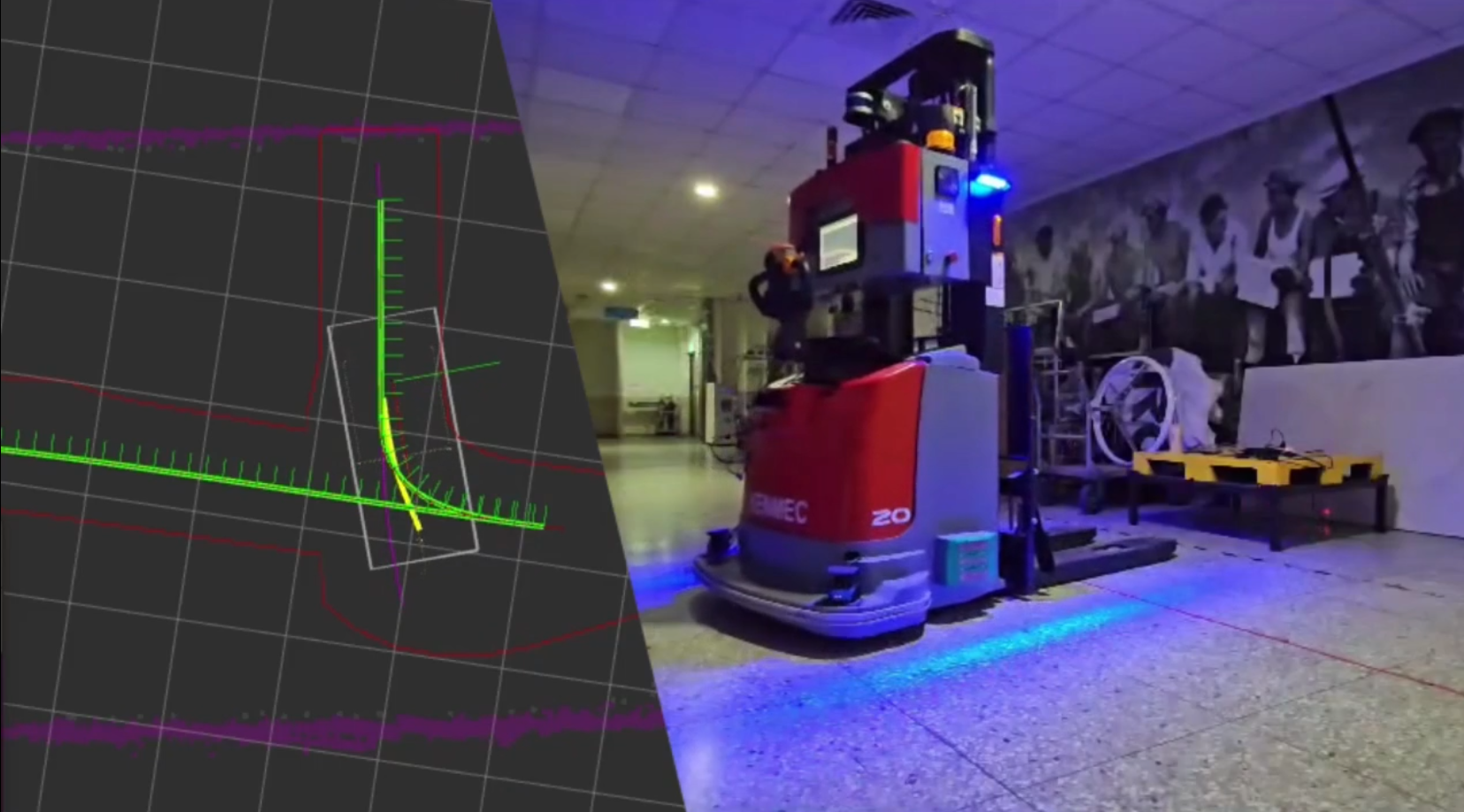
Model predictive control for autonomous forklifts
Industrial Technology Research Institute (ITRI) has entrusted us with the development of a new control technology tailored specifically for forklifts
Industrial Technology Research Institute (ITRI) has entrusted us with the development of a new control technology tailored specifically for forklifts

Optifruit Robotics partnered with us to create an innovative solution for apple orchard management. Leveraging our expertise in robotics and

In 2021, we started this exciting collaboration with Relox Robotics to transform the efficiency and precision of golf course maintenance.