
Revolutionising Urban Deliveries with Autonomous Robotics
In collaboration with Scania, we are pushing the boundaries of last-mile delivery with “Carrie,” an innovative robot that redefines urban
In collaboration with Scania, we are pushing the boundaries of last-mile delivery with “Carrie,” an innovative robot that redefines urban
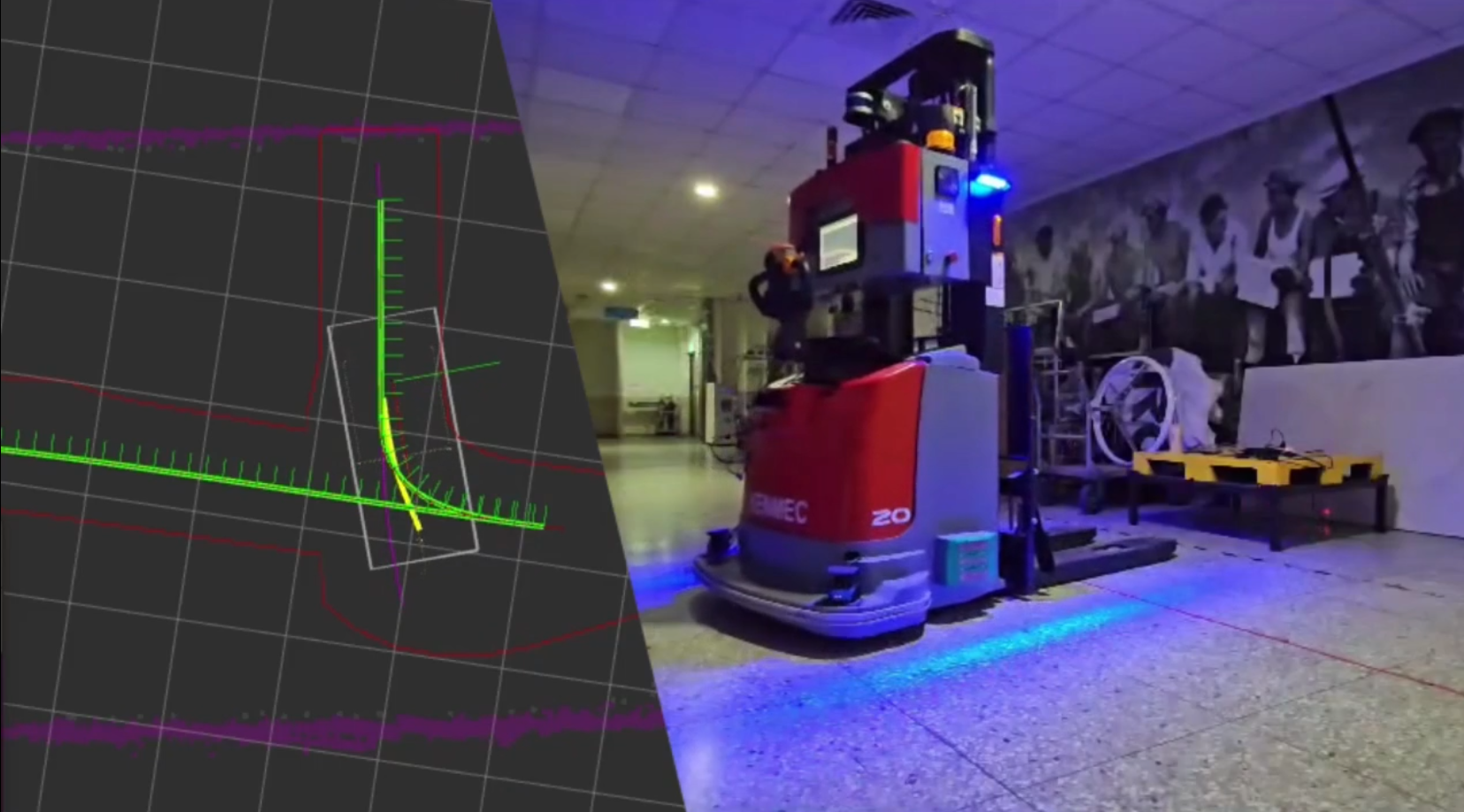
Industrial Technology Research Institute (ITRI) has entrusted us with the development of a new control technology tailored specifically for forklifts

Optifruit Robotics partnered with us to create an innovative solution for apple orchard management. Leveraging our expertise in robotics and