Design & HMI
The most techically advanced robot in the world wouldn’t be any good if nobody wanted to use it.

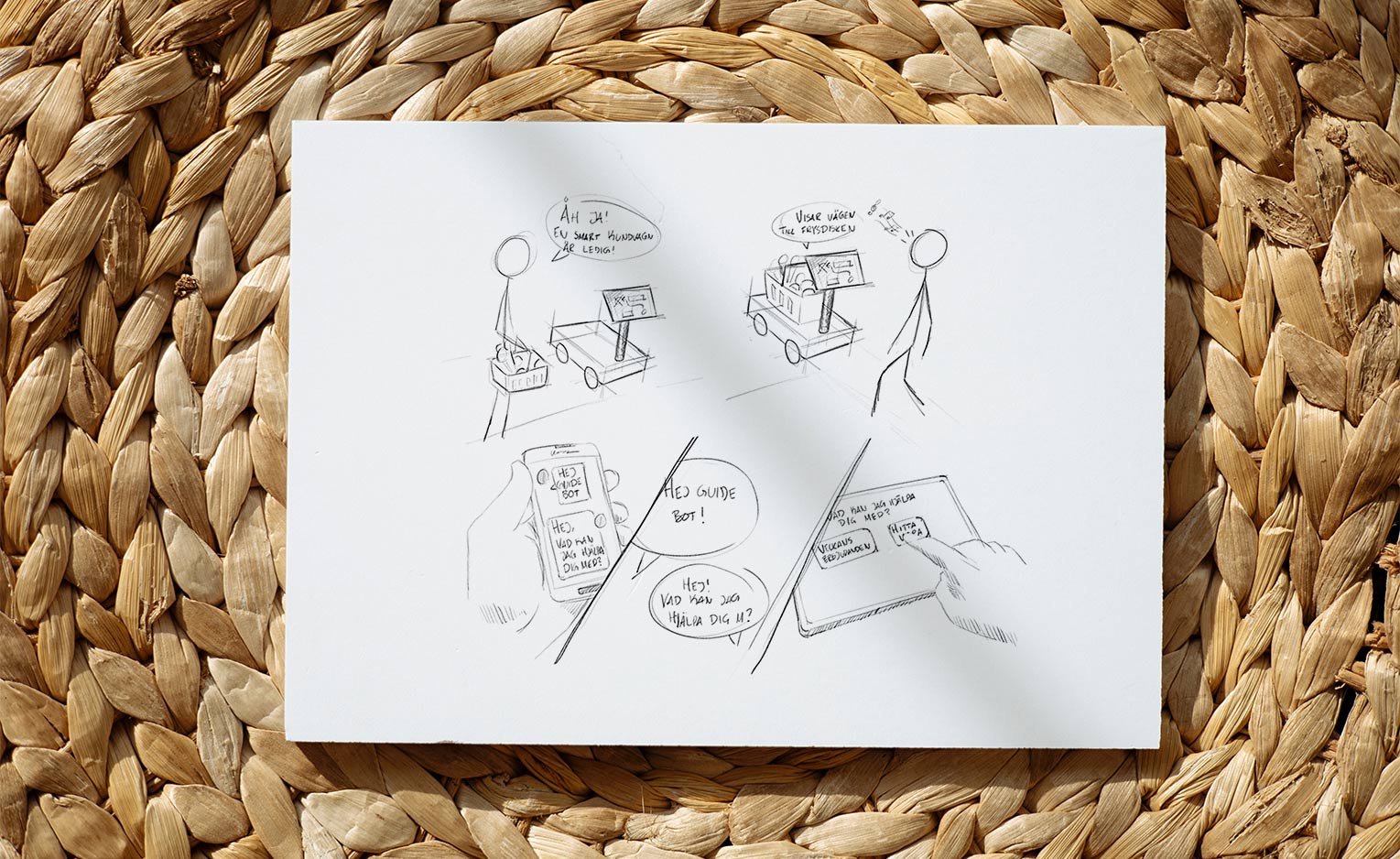
Natural language processing (NLP)
Natural language processing (NLP) allows for natural interaction with robots and computers. It is about making our technology more human.

Digital Twins
Digital twins allow us to develop, test, and refine robotic systems long before they are deployed in the real world.

Computer vision
Computer vision enables robots to perceive their surrounding similar to how us humans do.
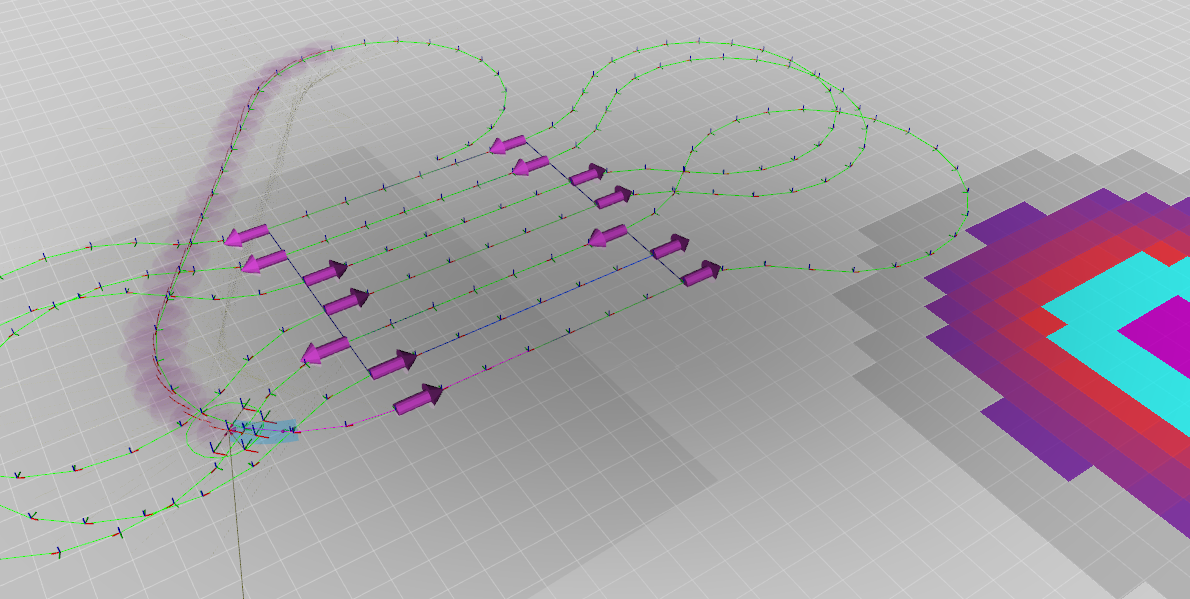
Autonomous Navigation
Automatic path planning and following is an essential part of many useful robot applications. At Dyno Robotics we have a broad experience of applying autonomous navigation technologies to real world applications.
